|
|

|

|
| e-Pub |
Section: New Results
Person Re-identification by Pose Priors
Participants : Slawomir Bak, Sofia Zaidenberg, Bernard Boulay, Filipe Martins, Francois Brémond.
keywords: re-identification, pose estimation, metric learning
|
Human appearance registration, alignment and pose estimation
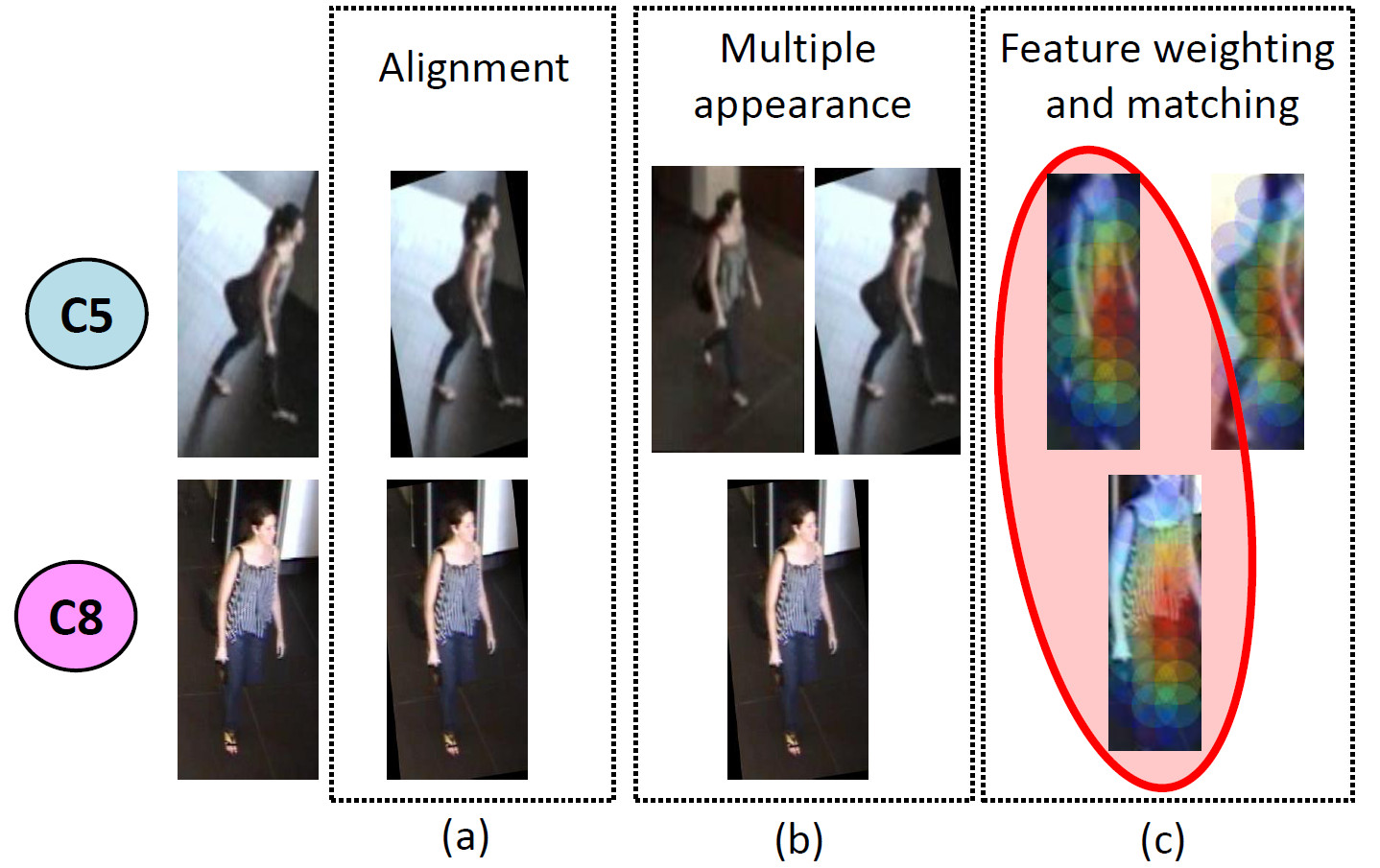
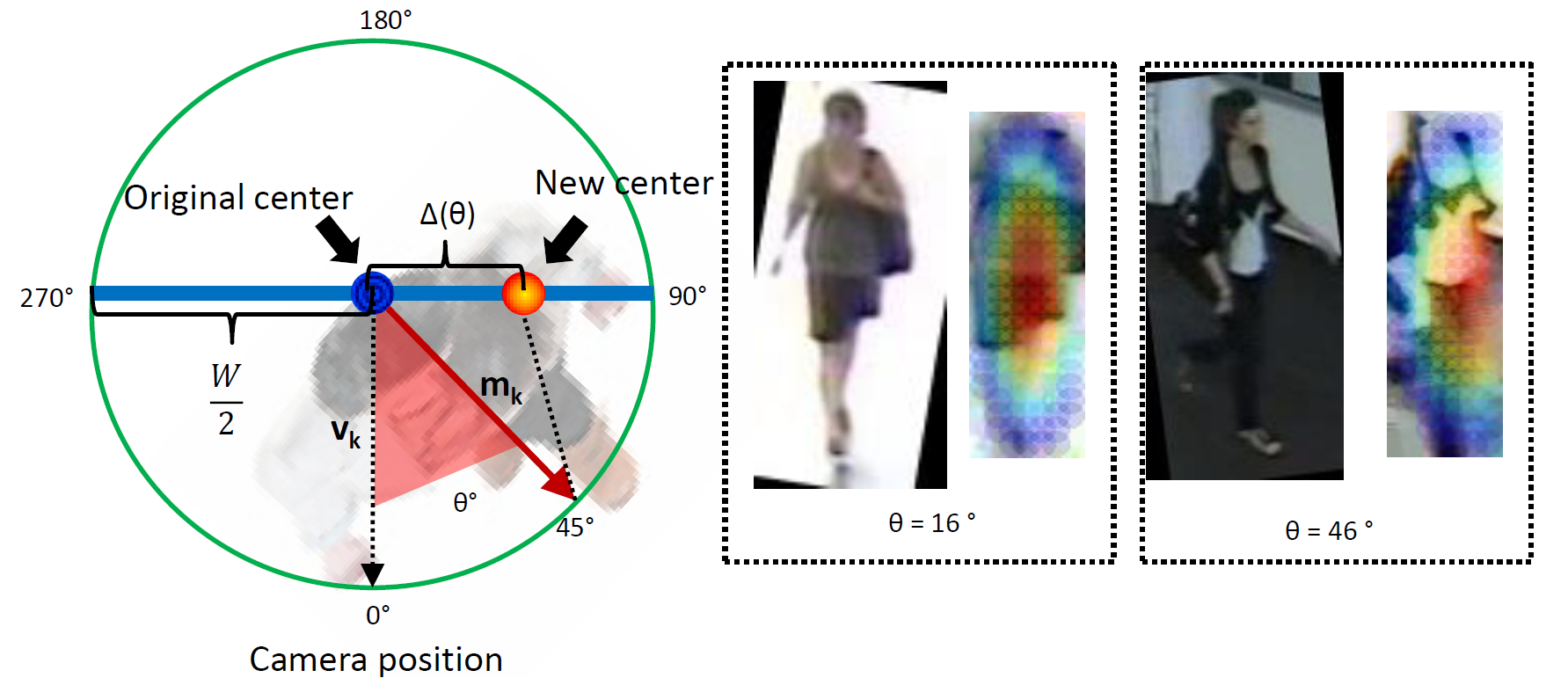
Re-identifying people in a network of cameras requires an invariant human representation. State of the art algorithms are likely to fail in real-world scenarios due to serious perspective changes. Most of existing approaches focus on invariant and discriminative features, while ignoring the body alignment issue. In this work we proposed 3 methods for improving the performance of person re-identification. We focus on eliminating perspective distortions by using 3D scene information. Perspective changes are minimized by affine transformations of cropped images containing the target (1). Further we estimate the human pose for (2) clustering data from a video stream and (3) weighting image features. The pose is estimated using 3D scene information and motion of the target. Pose orientation is computed by dot product between viewpoint vector and motion of the target (see figure 22 ). We validated our approach on a publicly available dataset with a network of 8 cameras. The results demonstrated significant increase in the re-identification performance over the state of the art [36] .
Matching employing pose priors
|
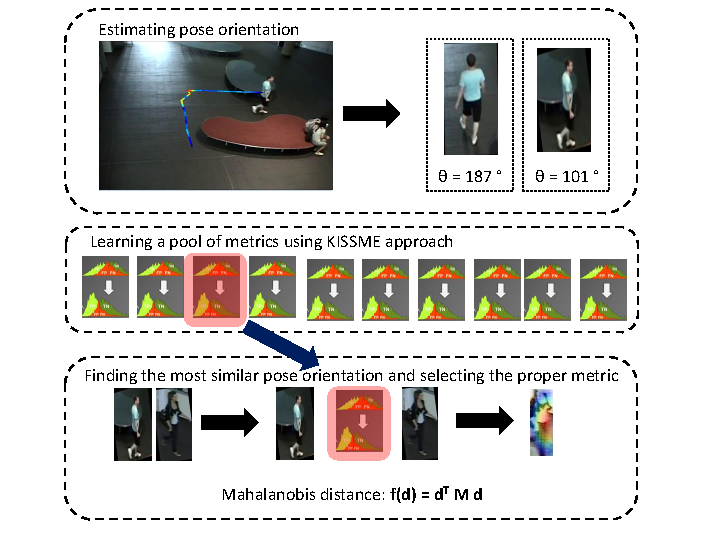
Currently we are working on learning the matching strategy of appearance extracted from different poses. We employ well known metric learning tools for matching given poses. Let us assume that pose can be described by the angle between the motion vector of the target and the viewpoint vector of the camera (see figure 22 ). Thus for each target appearance we can express the pose as the angle in the range of [0,360). We decide to divide this range into n bins. Given n bins of estimated poses, we learn how to match different poses corresponding to different bins. In the result, we learn metrics. While learning metrics, we follow a well known scheme based on image pairs, containing two different poses of the same target as positives and pairs of different poses containing different targets as negatives. The learned metrics stand for the metric pool. This metric pool is learned offline and does not depend on camera pair. In the result, once metric pool is learned, it can be used for any camera pair.
Given two images from different (or the same) camera, we first estimate the poses for each image. Having two poses, we select a corresponding metric from the metric pool. The selected metric provides the strategy to compute similarity between two images (see figure 23 ).